2017/12/12
© Данілава Святлана, група э-602, ЭФ МДУ
У цяперашні час сістэму гарадскога транспарту можна ахарактарызаваць развіццём гарадскіх дарог і ростам дарожнага трафіку, якія прыводзяць да росту коркаў. З прычыны працяглага часу, праведзенага ў корках, падарожжа можа апынуцца цяжкім як для аўтааматараў, так і для аварыйных службаў і аўтакалон, якія перавозяць грузы і «адчувальныя» тавары. Для вырашэння гэтай праблемы было выкарыстана імітацыйнае мадэляванне для аналізу і аптымізацыі часу поезки для ўдзельнікаў дарожнага руху ў гарадскім асяроддзі. Артыкул, па якім напісана дадзенае эсэ, прысвечана аптымізацыі транспартнага патоку ў горадзе Сібіу (Румынія, рэгіён Трансільванія) з дапамогай агент-арыентаванай мадэлі і праграмнага забеспячэння AnyLogic.
ўвядзенне
Транспартная інфраструктура гуляе важную ролю ў развіцці любога горада. Эфектыўнае функцыянаванне транспартных сістэм аказвае станоўчы ўплыў на жыццё насельніцтва ў найбольш густанаселеных раёнах горада. Дзесяцігоддзямі выкарыстоўвалася мадэль аналізу, якая абапіралася на паняцце «мабільнасці», г.зн. павелічэнне хуткасці рухаюцца транспартных сродкаў і адпаведна зэканомленага часу паездкі. Хоць на інтуітыўным узроўні такі падыход здаецца мэтазгодным, у цяперашні час ён аказваецца праблематычным.
Пры аналізе сістэмы гарадскога транспарту неабходна прыняць да ўвагі мноства фактараў: вуліцы, аўтамагістралі, веласіпедныя дарожкі, маршруты грамадскага транспарту і г.д. Здольнасць рэалістычна прадказаць попыт на перавозкі мае вырашальнае значэнне для планавання дарожнай інфраструктуры. У сувязі з гэтым у апошнія дзесяцігоддзі актыўна выкарыстоўваюцца агент-арыентаваныя мадэлі развіцця горада. У літаратуры можна знайсці мноства агент-арыентаваных мадэляў планавання сістэмы гарадскога транспарту ў розных геаграфічных маштабах і з рознай ступенню дэталізацыі паводзін агентаў. Гэтыя мадэлі даказалі сваю эфектыўнасць пры мадэляванні усёй шматстатнасці гарадскога асяроддзя.
Агент-арыентаванае мадэляванне з'яўляецца надзейным інструментам для аналізу альтэрнатыўных сцэнарыяў развіцця гарадской асяроддзя. Мадэляванне такой сістэмы складана правесці традыцыйнымі метадамі з прычыны складанасці рэальнага свету і наяўнасць узаемазалежнасцей паміж сістэмамі. Існуе тры асноўных падыходу: сістэмная дынаміка, дыскрэтна-падзейна мадэляванне і агентное мадэляванне. Для сістэмнай дынамікі мяркуецца высокі ўзровень абстракцыі, гэты падыход выкарыстоўваецца для вырашэння задач стратэгічнага ўзроўню. Пры дыскрэтна-падзейным мадэляванні працэс апісваецца як паслядоўнасць асобных дыскрэтных падзей, мадэляванне адбываецца на сярэднім узроўні абстракцыі. Пры агент-арыентаваным падыходзе мадэлюецца паводзіны кожнага асобнага агента і ўсталёўваюцца сувязі паміж імі. Больш падрабязна аб гэтых трох падыходах можна даведацца на сайце https://www.anylogic.ru/ . Выкарыстанне таго ці іншага падыходу залежыць ад тыпу сістэмы або працэсу, а таксама мэтаў мадэлявання.
прыклад
Разглядаецца прыклад аптымізацыі сістэмы транспартных патокаў у горадзе Сібіу. Для мадэлявання было ўзята спадарожнікавае малюнак горада з Google Maps. Сібіу - горад, размешчаны ў Трансільваніі (Румынія), з насельніцтвам 147.245 чалавек. Горад размешчаны ў 215 км на паўночны захад ад Бухарэста. Горад перасякае рака Сибин, прыток ракі Олт. Сібіу з'яўляецца адным з найважнейшых культурных цэнтраў Румыніі.
Для дадзенага артыкула быў разгледжаны сцэнар руху транспартных патокаў па дарозе, якая перасякае раку Сибин і вядзе да выезду з горада. Паколькі выезд з горада праходзіць побач з міжнародным аэрапортам горада Сібіу, то ў гадзіны пік там часта перашкоды руху.
Перадумовы мадэлі: разглядаецца аўтакалона, якая складаецца з 5 транспартных сродкаў, якая заязджае ў горад з паўднёвай яго боку і рухаецца на захад, да выезду з горада. Аўтакалона накіроўваецца да мытнага тэрміналу, размешчанага побач з аэрапортам, каб пагрузіць тавары і адчувальныя грузы. Па накіраванні свайго руху аўтакалона павінна праехаць па адзінай даступнай дарозе, якая праходзіць па мосце праз раку Сибин. Гэты маршрут дастаткова загружаны, асабліва ў пачатку і канцы тыдня.
Пастаноўка праблемы: як аптымізаваць транспартныя патокі ў названай частцы горада Сібіу, каб паменшыць час у шляху аўтакалоны з улікам магчымых пробак (мал. 1).
![]()
Мал. 1. Раён горада Сібіу.
Каб вырашыць задачу аптымізацыі, была пабудавана імітацыйная мадэль з дапамогай праграмнага забеспячэння AnyLogic University Researcher v.7.3.6. Пабудова мадэлі адбывалася ў адпаведнасці з наступнымі этапамі.
Этап 1. Стварэнне дарожнай сеткі.
Спачатку была створана новая імітацыйная мадэль з назвай "Transportation_Sibiu city". Затым у AnyLogic быў дададзены спадарожнікавы здымак з Google Maps, які адносіцца да які цікавіць нас раёну горада Сібіу. Для рэалістычных вынікаў здымак павінен быў быць промасштабирован ў адпаведнасці з маштабам ў AnyLogic (маштаб 20 метраў).
Затым былі створаны дарогі і дарожныя развязкі так, як яны праходзяць у рэальным свеце (мал. 2).
![]()
Мал. 2. Раён горада Сібіу, дарогі ў AnyLogic.
Этап 2. Логіка траспортных патокаў.
Пасля першага этапу была пабудавана блок-схема з улікам кірунку руху па палосах. Блок-схема змяшчае наступныя элементы: carSource, carMoveTo, carDispose, selectOutput. Элемент selectOutput можа мець 2 ці 5 выходных порта. Калі ў аўтамабіля ёсць магчымасць павярнуць налева, направа ці ехаць прама, то варта выкарыстоўваць selectOutput5. На мал. 3 сегменты дарогі звязаны з элементамі.
![]()
Мал. 3. Блок-схема гарадской транспартнай сеткі.
Этап 3. Усталёўка святлафораў.
Пасля стварэння блок-схемы мадэль была запушчана для выяўлення неадэкватнага функцыянавання. Для дарожных развязак неабходна ўсталяваць святлафоры (мал. 4 і 5). Без іх AnyLogic выведзе папярэджанне.
![]()
Мал. 4. Мадэляванне дарожнага трафіку.
![]()
Мал. 5. Усталёўка святлафораў.
Этап 4. Аптымізацыя працы святлафораў.
Спачатку было знойдзена сярэдні час руху - 63,345 сек. (Мал. 6) пры часе мадэлявання каля 10 мін. (600 сек.)
![]()
Мал. 6. Вынік мадэлявання.
Затым сістэма транспартных патокаў была аптымізавана шляхам памяншэння часу кожнай фазы працы святлафораў. Час працы кожнай фазы было параметризовано. Выкарыстоўвалася 4 параметру са значэннем па змаўчанні 30 сек .: p1 і p2 для trafficLights; p3 і p4 для trafficLights1. Для аптымізацыі транспартнай сістэмы быў праведзены эксперымент, у якім вырабляўся пошук набору параметраў, які забяспечваў бы мінімальнае значэнне мэтавай функцыі (часу руху). AnyLogic адлюстроўвае аптымізацыйных працэс у ходзе паслядоўных ітэрацый. Усе параметры змяняліся ў дыяпазоне ад 10 да 35 сек. з крокам 5 сек. Усяго было праведзена 200 ітэрацый. На мал. 7 графік адлюстроўвае працэс аптымізацыі. Па восі X адкладзены нумар ітэрацыі, па восі Y - бягучае значэнне, найлепшае недасяжнае значэнне, найлепшае дасягальна значэнне для кожнай ітэрацыі. Затым усе найлепшыя дасягальныя значэння для кожнага параметру былі выкарыстаныя для зыходнай імітацыйнай мадэлі.
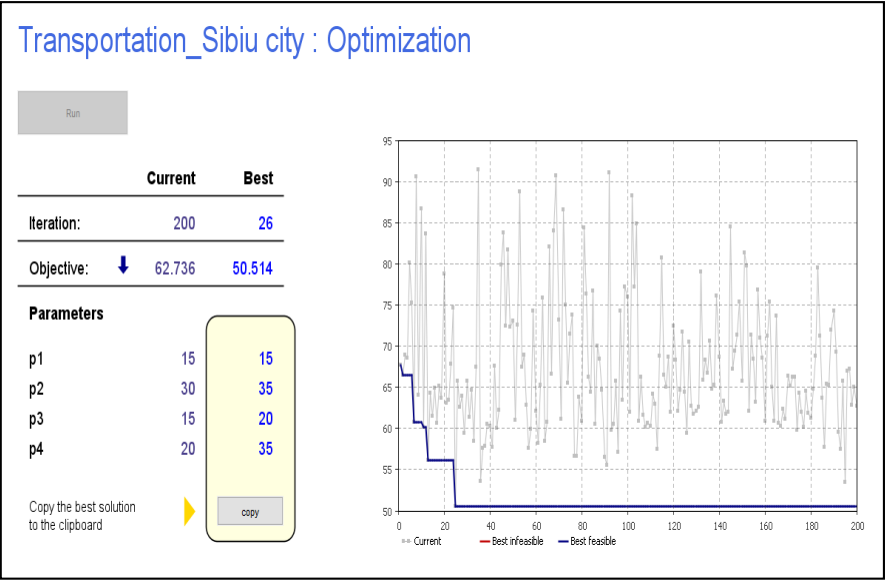
Мал. 7. Вынікі аптымізацыі.
На мал. 7 паказаны атрыманыя значэнні параметраў: p1 = 15s, p2 = 35s, p3 = 20s, p4 = 35s. Пасля падстаноўкі названых значэнняў у зыходную мадэль сярэдні час паездкі зменшылася з 63,345 сек. да 50,514 сек. (Мал. 8).
![]()
Мал. 8. Аптымізаваная мадэль.
заключэнне
У цяперашні час рашэнне задачы аптымізацыі транспартных патокаў у густанаселеных раёнах горада гуляе важную ролю. Гарадская транспартная сістэма можа быць змадэляваныя і прааналізавана з дапамогай праграмнага забеспячэння AnyLogic. У дадзеным артыкуле былі прыведзены вынікі аптымізацыі транспартнага патоку для горада Сібіу (Румынія). Шляхам змены працы розных фаз святлафора было дасягнута памяншэнне часу паездкі з 63,345 сек. да 50,514 сек. Для ўдакладнення вынікаў дадзенага агент-арыентаванага мадэлявання трэба дадаткова даследаваць уплыў паводзін пешаходаў, розных відаў транспарту, веласіпедыстаў і да т.п.
Арыгінал артыкула: [Coman Marin-Marian, Dorel Badea. "The Vehicles Traffic Flow Optimization in an Urban Transportation System by Using Simulation Modeling." Land Forces Academy Review 22.3 (2017): 190-197].


